In any Mechanical or Electronic system, where ever there is a continuous rotational motion involved, there is a Motor. And in the modern-day automotive, where comfort is as important as the driving efficiency, Motors play a pivotal role.
Be it the windows, seats, steering, turbochargers, ventilation flaps or brakes, there are Electric Motors to be found in each of these components. In fact, there are a few hundred electric motors in a passenger car. You see, they are called Motor-Cars for a reason!
The motors, however, don’t start and stop on their own. Like many other automotive components that are controlled by Electronic Control Units (ECU), there are also Motor Control Systems to drive a Motor.
To understand this system in detail, we met our automotive team members, who were more than eager to share their knowledge and insights with us.
While we had a basic understanding of Automotive Motor Controllers, we didn’t have the faintest of idea about how advanced these motor control systems have become. This blog is about sharing these learning with our community of Automotive Developers.
Different Types of Motors you would find in your Automobile
Our conversation with the Automotive Team began by discussing the various types of electric motors deployed in modern-day cars
During this discussion, we realized that Electric Motors have come a long way, as far as their applications in automotive industry are concerned. And this evolution is still on-going.
Many safety as well as comforting features in a vehicle, require Electric Motors. Depending on the applications, there are primarily 3 types of motors that are widely used in the vehicles:
- Brushed DC Motors: These DC motors have metallic brushes between the motor coils and the rotors that complete the circuit. There is no electronic component required to operate this motor. They are ideal motors for Power Window, Seating Control, and other such applications where mechanical parts are operated without any assistance of an electronic systems (like an MCU or a drive logic).
- Brushless DC Motors: These are one of the most widely used DC Motors. A brushless DC motor has permanent magnets as the rotors. As the current is passed through the motor coils (stator), the rotor being a permanent magnet starts to rotate. As there is no physical contact between the stator and rotor, a motor controller is required to alter the speed of the BLDC motor.
- AC Induction Motor: Most widely used in Electric Vehicle Drivetrain applications, an AC Induction Motor works on the principles of Faraday’s law of induction. There is a rotating magnetic field produced due to the alternating current in the coils. This moves the rotor. The speed of the motor can be altered by varying the frequency of the alternating current supplied to the motor.
Understanding the Anatomy of an Automotive Motor Control System
Business use-cases and applications of Electic Motors in automotive, called for systems which can control the motor according to the application-specific logic. For instance, a motor deployed in an Electronic Power Steering (EPS) system is required to alter its speed based on the torque applied by the driver on the steering wheel.
A motor control system is required to implement this logic.
This system is essentially an Electronic Control Unit (ECU) like all other ECUs in a vehicle. It comprises of a Microcontroller ported with the Motor Drive Logic (software) and integrated with some other Motor-Control peripherals (hardware).
The Motor Drive Logic is the software algorithm that drives the motor in the intended manner. The peripherals like gate driver IC, MOSFETS etc. are part of the control system that performs auxiliary tasks like error feedback handling, signal conditioning, current and voltage amplification. We will learn more in detail about all these components, very soon!
We were also introduced to how a Motor Control System works. But before we get started with this,.
Let’s first learn about the components of a Motor control system:
- Microcontroller: Microcontroller Unit (MCU) is essentially the component where the Motor Drive Logic is stored.
For instance, in an electronic power steering application, a steering control algorithm will be stored in a microcontroller platform. The algorithm is used to vary the speed of the motor using Pulse Width Modulation (PWM) signals.
Input and Output buttons can be interfaced with this MCU. PWM signal which is generated as the output and is interfaced with the next core component of the Motor Control System.
- Gate Driver IC: Gate Driver IC also known as a pre-driver is that next core component! It, receives the PWM signal from the MCU and amplifies it to make it suitable for the MOSFET.
This was a little confusing for us because knowing that MOSFETs are generally used to amplify the voltage, then what is the purpose of having a Gate Driver IC in a motor control system.
We were informed that there is a certain threshold voltage value that is required by a MOSFET to be able to function; Gate driver IC provides that threshold voltage. Also, there are some signal conditioning algorithms in the Gate driver IC that removes the noise from the signal and smoothens it.
- MOSFETs: These are field effect transistors that can amplify a few milliamps current to ten times and small voltage value to several hundred volts. As electric motors require minimal switching time in varying the current flow to the motor, MOSFETs are an indispensable part of the Motor Control System.
- Hall Effect Sensors: The role of Hall Effect sensors in automotive motor control application is to determine the position of the motor. It is essentially a transducer that will induce a voltage when the flowing charge comes under the effect of a permanent magnet.
Hall sensors are fitted to the rotor so that its position is known before the motor coils are energized.
The following diagram shows the different components of a motor control system
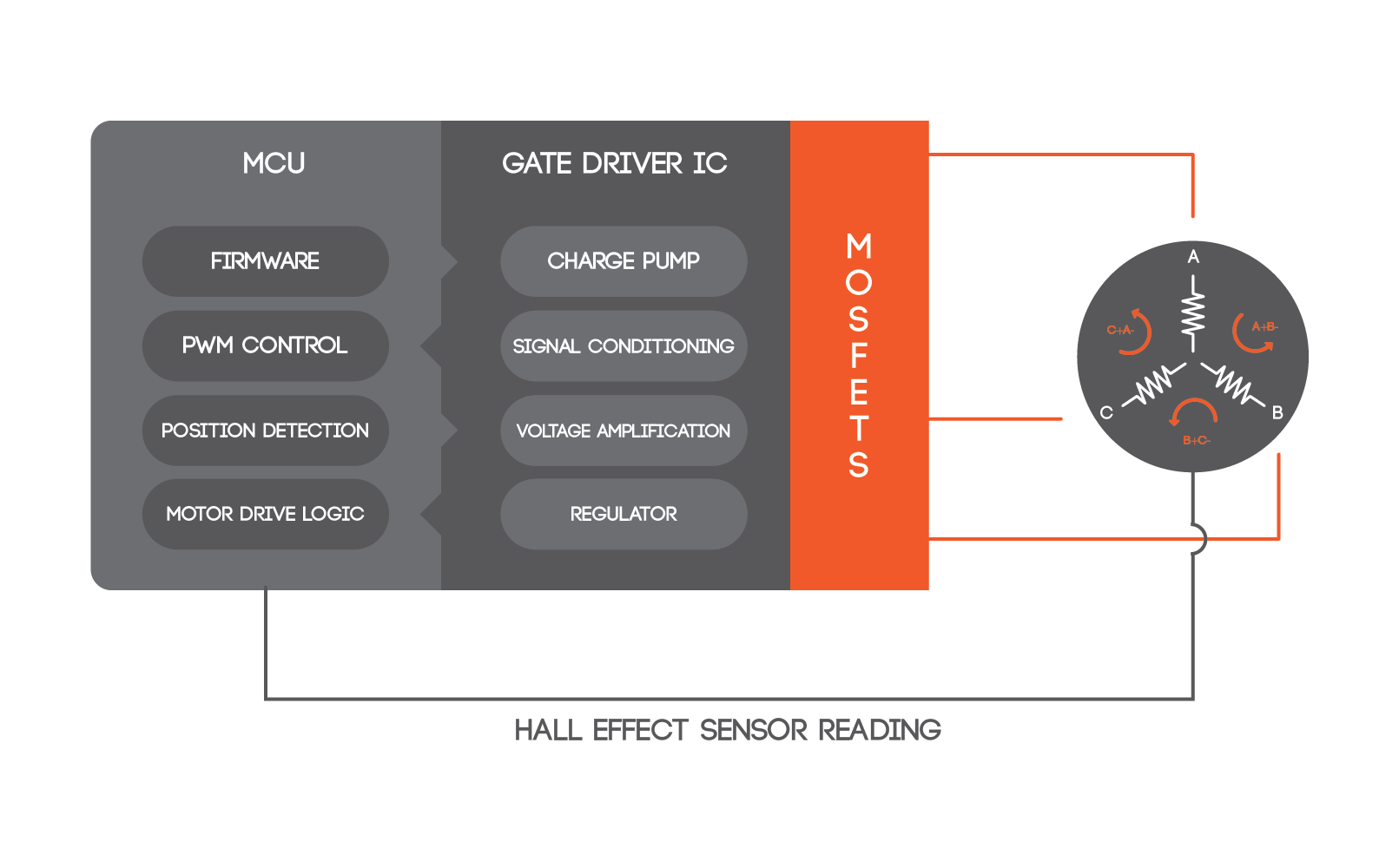
A Typical Automotive Motor Control System with a 3-phase BLDC Motor
How a Motor Control System Works?
The signal to start or stop an electric motor comes from the microcontroller. Unlike a brushed DC motor, where there are brushes to complete the motor circuit, BLDC motors use Hall-effect sensors to energize the motor coils.
The microcontroller uses the input from Hall-effect sensor to determine the position of the rotor. Based on the position, it will energize the motor coils thus creating a rotating electrical field. This field will move the rotor along with it.
This is the physics and mechanics behind the motor movement.
Post this, we discussed the electronics behind the motor control system and the role of MCU and the gate drivers.
The Microcontroller unit is ported with the motor drive logic, Pulse Width Modulation module and other algorithms depending on the application. Based on the logic, the PWM signals will be relayed from the MCU. The Hall-effect sensor will determine the exact moment when the PWM signal should be sent to the motor.
For example, if the BLDC is deployed in an electronic power steering, the MCU will have steering control/assist algorithms and PWM signal will be produced according to that logic. The timing will still be controlled by the Hall-effect sensor.
While the microcontroller unit gives the BLDC motor a start, there are other components required to keep it running. They are the gate driver IC or the MOSFETs. Power control and motor drive are two things that the MOSFETs and gate driver unit are tasked with.
As mentioned earlier, MOSFETs can amplify current and voltage to fairly high levels. However, at times, a gate driver IC is also required to condition the signal going to the MOSFET. The gate driver IC or the pre-driver IC is a kind of pre-amplifier that filters out the noise in the signal before it is fed to the MOSFET and eventually to the BLDC motor.
In most automotive motor control applications, these MOSFETs are structured in an H-bridge configuration where they control the current flow path to the motor coils. This ensures full control of the speed and direction of the BLDC motor.
Now that the working of a motor control system is clear, let’s look at some of their applications in the area of automotive:
Some Common Applications of Motors in Vehicles:
- Electronic Power Steering-A BLDC motor works with a MCU with steering control algorithm, PWM, current loop PI etc.
- Seating Control: Electronically adjustable seats are also driven by electric motors. Some advanced algorithms in the motor control system ensure that there is no jerk or sudden start/stop in the seat. It is called soft stop/start.
- Electric Vehicles Drivetrain: Most electric vehicles deploy an AC induction motor in their drive train. A three-phase AC power input is given to the motor that produces rotating magnetic field. By altering the frequency of the AC power supply, the speed of the wheel can be adjusted.
Concluding Thoughts
The combination of mechanics and electronics has led to various advancements in automotive motor control system. A simple brushless DC motor is now being deployed to make some smart moves as it is driven by motor drive logic.
If you drive a modern car, you must have noticed how smooth the power steering, power window and seat adjustment etc. has become. All this has been possible with advanced motor control system that not only drive a motor in different speeds and directions, but also in an efficient and smooth manner.
However, the most prominent role of electric motors can be witnessed in electric vehicles that are virtually run by motors, both DC and AC. Electric Vehicle pioneers like Tesla etc. are investing heavily on motor control system that can get maximum output from motors with the least input.