- sales@embitel.com
- +91 8041694200






Vehicle Simulation
Requirement
Vehicle simulation and testing of the powerplant for high and cornering torques in hard real time.
System Overview
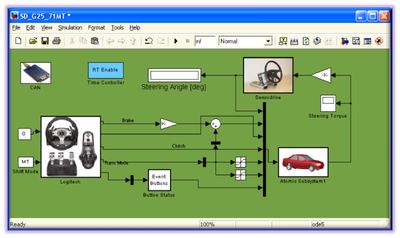
Hybrid powerplant model when tested in non-real time or soft real time causes vibrations in the steering wheel because of the unwanted delays in the system. So, the model needs to be tested in hard real time for high and cornering torques.
Powerplant model is developed in Carsim and imported to Simulink as a library. Sensowheel block sets are used for interfacing with the sensodrive steering wheel and Logitech pedal controls. PCAN communication is used to send and receive messages from the sensodrive controller.
Implementation
- Controller Model development in Simulink
- Developing the controller model for a vehicle plant model created in Carsim
- Controller model includes the interface block sets for Sensowheel and Logitech pedal controls
- PCAN Setup for communication
- PCAN communication is setup between the plant model running on XPC target and the sensowheel
- Hybrid powerplant Model Testing
- The application code is generated and downloaded to XPC target
- Hybrid powerplant model is tested for high and cornering torques
Testing and Validation
- Plant model developed in vehicle simulation environment is imported to Simulink as a library.
- Controller is tested in loop with the plant library, pedals and steering wheel.
- Controller is tested for high and cornering torques
Tools
- Simulink
- Carsim
- XPC
- Sensowheel blockset
Connect With Us
+91 80 41694200
+49 (0)711-60 17 47-788 / 789
+49 (0)711-60 17 47-789
+1-248-385-2017
+49 170 1688028
Product Engineering
Head-up Display
Infotainment
J1939 Stack
OBD 2 Stack
Bootloader Software
ISOBUS Stack
Telematics Platform
ECU Development
AUTOSAR
HMI/UI Development
IoT
Embedded Software and Hardware
Digital Commerce
Ecommerce Consulting
Ecommerce Platform Design
Ecommerce Platform Development
Ecommerce SEO & Marketing
Ecommerce Managed Services
Ecommerce Hosting
Magento Ecommerce Development
Magento 2 Migration Service
Mobile App Development
Ecommerce Service Suite
Hybris Ecommerce Development
















