Configuration and Integration Support for ECU Communication and Diagnostics Protocols in a Telematics System
About the Customer
Our customer is a leader in design and manufacturing of solutions across industries viz. automotive, IoT, healthcare and more.
Their solutions find application in autonomous driving, connected cars, medical devices, etc.
We had the opportunity to collaborate for an innovative Telematics system to power Fleet Management for both commercial and passenger vehicles.
Business Challenge
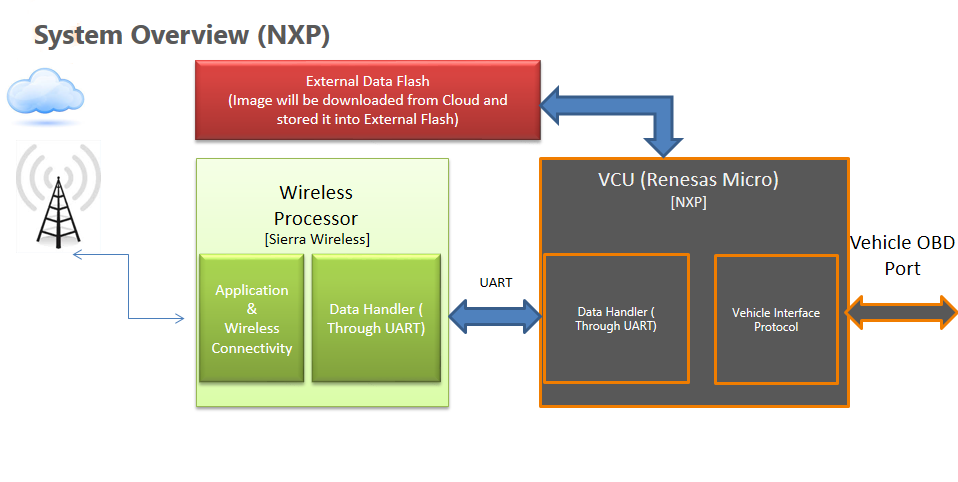
Communication is the backbone of any telematics devices inside a vehicle. Our customer had developed a state-of-the art telematics system to enable fleet management. However, the in-vehicle communication part was posing a challenge.
As the telematics system was designed for both passenger and commercial vehicles, several in-vehicle communication protocols were required to be implemented in the telematics ECU.
Further, the system also had to support older commercial vehicles that used almost obsolete communication protocols.
Developing all these proprietary protocol stacks required a dedicated team with specialized skills, as well as a number of licenses to be bought.
Getting in touch with a technology partner with ready-to-integrate protocol solution would not only reduce the cost but also ensure that the time-to-market is reduced considerably.
And that’s how this collaboration shaped up.
Embitel Solution
Following a series of discussions with the tech team of our customer, a list of communication protocols to be integrated was prepared.
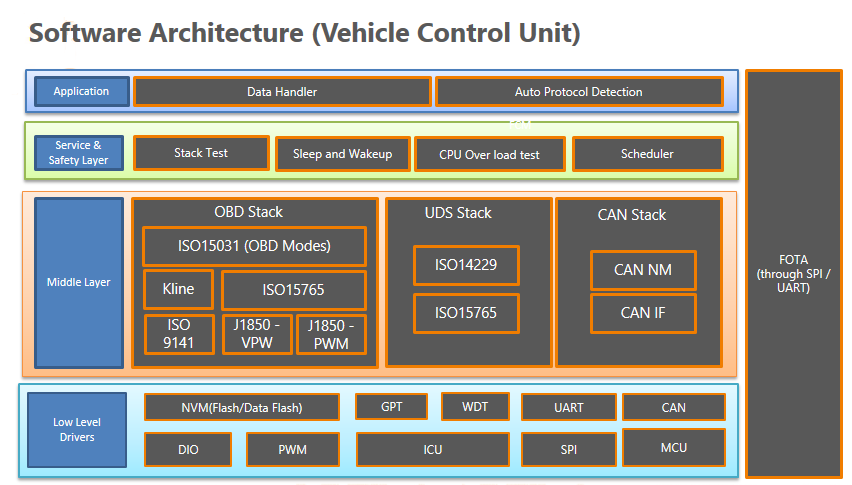
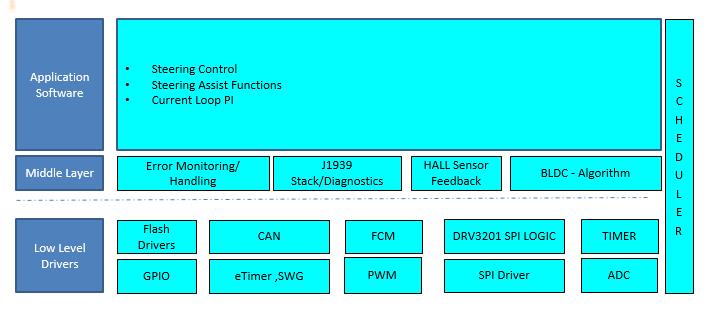
Following protocol solutions were configured and integrated with the telematics platform:
- CAN2.0 250/500
- SAE J1939
- SAE J1587 / J1708
- Single Wire CAN2
- Low Speed CAN2
- K-Line
- ISO9141
- CAN FD
- Unified Diagnostic System (ISO 14229)
- TP2.0
- Autoprotocol/ AutoBaud Detection
- OBD Stack – CAN, Kline, ISO9141
Our library of pre-tested and ready-to-deploy automotive protocol solutions contains each of these stacks. The task at hand for the engineers was to configure these stacks based on the requirements of the project.
We performed the configuration of the PGNs, CAN messages and other services required for the telematics system to communicate with vehicle ECUs and devices outside of the vehicle.
For instance, Classic CAN messages were configured to the SAE J1939 protocol software with the help of CAN IL tool.
*Our proprietary CAN IL tool automates the configuration process that would otherwise take weeks if performed manually. Result is lesser turn-around time and reduced chance of human error creeping into the configuration process.
Integration support with the Application Layer and the Low-level driver was provided to the customer.
Embitel Impact
Our team could save 6 months of man hours for our customers, courtesy our ready-to-deploy protocol solutions and the proprietary CAN IL configuration tool.
As the customer was aiming for a faster time-to-market, we were able to provide all the require support for the same.
Tools and Technologies
Freematics: It was used as an OBD simulator that helped our team perform the functional testing of the OBD stack before deployment.
CANoe from Vector: Helped us simulate the other automotive protocol stacks for verification
SAMTEC: Helped us simulate some older protocols like K-Line.
CAN IL Tool: Used to configure required CAN messages in SAE J1939 and other protocol solutions.