Development of AUTOSAR Compliant FLS Driver Development and FLS Configuration Tool
Category : Autosar , Product Engineering
About the Customer
Our customer is an automotive tier-1 company having a diverse range of automotive solutions including emissions system, automotive interiors, connected car applications and more. We have a long-established partnership with the customer on multiple automotive projects.
Business Challenge
Resetting of the watchdog before the intended instance was the primary challenge the customer was facing. Operations like read, write, and erase etc. were taking longer than usual since the watchdog was getting reset abruptly.
Customer’s internal team deduced that this issue is trigged by the faulty FLS driver. The logical solution to the issue was to replace the FLS driver where main function of the application is separated with read/write and erase function. Since, the customer was migrating the entire system to AUTOSAR architecture, the FLS driver was also supposed to be developed according to AUTOSAR specifications.
In addition to development of an AUTOSAR based FLS driver, a tool was also required to configure the FLS driver as per the parameters.
Embitel’s Solution
Upon carefully going through the system architecture, Embitel’s AUTOSAR team inferred that developing the FLS driver based on AUTOSAR specifications would resolve the watchdog timer reset issue.
The gap analysis of the existing FLS driver showed us that the function to reset the watchdog timer was not being triggered in the intended manner. We used this insight to develop the FLS driver in a way that watchdog reset function is separated from the main function. Since this function constantly monitors the time elapsed in the execution of an operation, it can reset the watchdog at the intended instance and not before or after that.
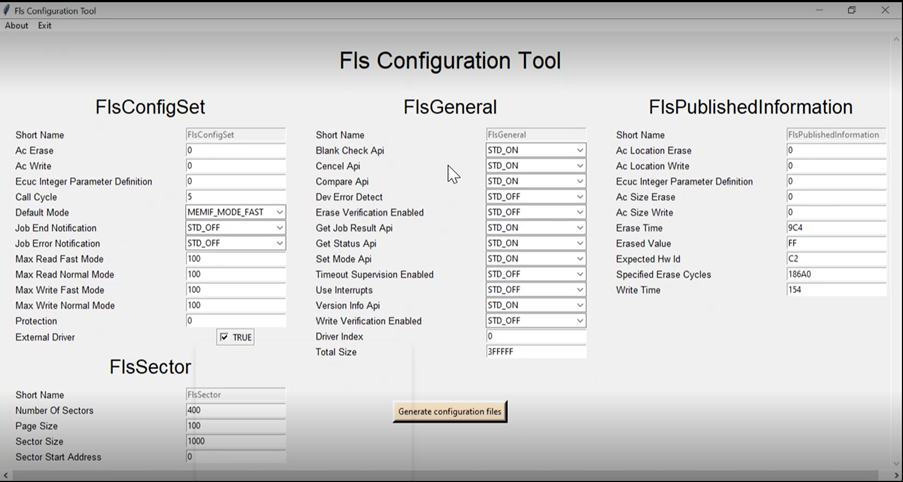
The FLS driver also must be configured for usage in a specific environment. We developed a Python based configuration tool for the purpose.
Final deliverables were as follows:
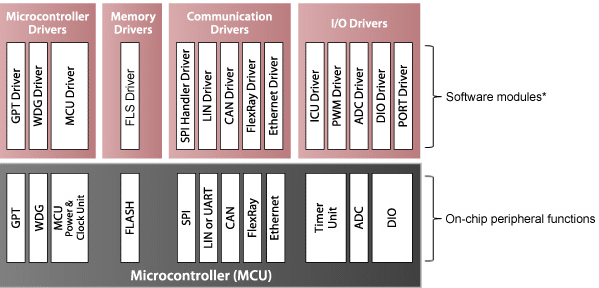
- We developed the FLS driver as per the AUTOSAR specifications provided by the customer so that all AUTOSAR compliant modules are in complete sync with each other, especially the QSPI driver which interacts directly with our FLS driver.
- A Python-based tool was developed to configure the FSL driver as per the specifications. Since AUTOSAR code is generally static, it needs to be configured for modules like FLSS driver. Configuration items like APIs need to be enabled/disabled and parameters etc. need to be set according to configuration strategy.
In addition to FLS driver and FLS configuration tool development, we also supported the customer in the integration process of FLS driver with other modules of the system.
Embitel’s Impact
Our FLS driver was able to resolve a major issue related to watchdog timer which was pulling down the efficiency of the entire solution. We were able to develop the tooling solution along with the driver in the provided time-frame which aided in faster turn-around time for our customer.
Tools and Technologies
Python: Used to build the FLS driver configuration tool
Compiler: IAR Embedded Workbench IDE