Our customer is a Tier 1 BMS solution vendor and one of the leading experts in Battery Management Systems.
Business Challenges
Our customer wanted to collaborate for a centralized Battery Management System with LiFePO4 battery for present day Electric Vehicle application. Since Embitel has shown significant progress in delivering successful BMS solutions, the customer partnered with us for this project.
Embitel’s Solution
Embitel technolgies proposed centralized BMS for 15S11P, 6Ah, 48V LIFePO4 battery with various performance and protection features –
Design and development of battery pack by using MATLAB/Simulink.
Design and development of State of Charge (SOC) estimation technique by ‘EKF+CC and State of Health (SOH) estimation.
Design and development of passive cell balancing system.
Design of power limit computation.
Development of temperature monitoring and controlling scheme for battery.
Development of protection circuits for over voltage/current and under voltage.
Decoding the Various Steps of the Centralized Battery Management System Development
Complete battery management system solution for Low power application up to 48v (15S11P).
Model based development (MBD)
Battery Cell Monitoring and Balancing
SOC and SOH estimation of battery
Battery Pack Interfacing, Diagnostics and Logging
Supports ASIL-D, functional safety standard ISO 26262 compliance services
Cyber Security standard ISO 21434.
Embitel’s Impact
The centralized Battery Management System platform software made the existing system easily configurable and maintainable to support future changes.
This challenging Battery Management System solution project was delivered within the desired time-lines and costs. This ensured reduce time-to-market and development costs for our client.
An EV friendly centralized Battery Management System with LiFePO4 battery is gradually gaining wider popularity and recognition in present day EVs. Hence, the success of this project had a long-term positive impact on the various business engagements of our customer.
We partnered with an automotive Tier-1supplier with a vision to develop future-ready automotive solutions. Our collaboration with this company spans multiple projects related to solution development, ISO 26262 compliance, verification and validation support, flash bootloader development and more.
Business Challenge
Our customer was developing an electronic steering adjustment system (Tilt and telescopic). Since the project follows ASPICE standard, development and complete testing of the system also needs to be performed as per ASPICE. Unit Testing, Integration Testing, and Functional testing (System testing) of such a complex solution requires enormous amount of man hours, if performed manually.
Key challenges:
Expertise required for tools like VT system for HIL testing
ASPICE system level 2 expertise was required
Expertise in tools for Unit testing, integration testing and static code analysis
To mitigate these challenges and complete the testing as per ASPICE standard, the customer came on-board with us.
Embitel’s Solution
Phase-wise release of the solution was planned during the discussions with the customer and our development team.
Following aspects were part of the project plan:
Software design, implementation, and testing
Hardware design, implementation, and testing
System design and testing (HIL testing using VT system)
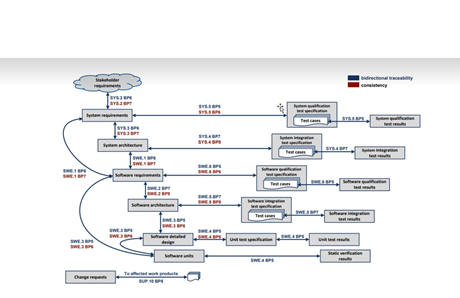
ASPICE compliance by maintaining bi-direction traceability, so that every point in the report traces back to a requirement
Entire spectrum of testing right from unit testing and integration testing to software qualification testing was covered during the project lifecycle. The testing team was built in a way to include experts of all forms of testing.
Final Deliverables of the Testing Activities:
Summary test report
Release report
Separate document listing issues raised during testing
Diagnostics and fault testing document (open current, overload current)
We followed the ASPICE v3.1 standard document for planning and executing the test activities.
Embitel’s Impact
We automated the functional testing of ECU which resulted in 70-80% of code being tested in the automation mode. Using CAPL scripting, the test cases were automated and the execution of tests took only 4-5 hours. It would have otherwise taken 1-2 weeks for manual testing.
Tools and Technologies
DOORS tool: DOORS is a requirement management tool. It is used to create test cases based on the requirements.
V Test Studio: V Test Studio is a test authoring tool for embedded systems.
CANoe: It is a software tool for development, test and analysis of automotive ECUs.
CAPL: CAPL scripting is used to automate test case creation and execution.
Disclaimer: This engagement had put to test, our team’s capability in achieving ASIL-C compliance of the Complex Device Drivers for an AUTOSAR based Powertrain control unit.
About the Customer:
We have a long-standing and a successful partnership with this India based OEM, pioneering in Electric Vehicles.
During our previous engagements, our automotive product engineering team had developed Complex Device Drivers (CDD) for the customer. These device drivers were necessary to extend the functionalities of a pre-designed AUTOSAR based powertrain ECU.
Some new hardware components in the powertrain ECU like speed sensors, and Real Time Clock (RTC), I/O expander, H-Bridge etc. had to be added. Due to speed constraints and few other limitations, these components had to be kept separate. Therefore complex device drivers were required for the communication between powertrain ECU and additional hardware components.
Also having develop confidence in our Automotive Functional Safety capabilities, the customer inked an additional responsibility and entrusted us with ISO26262 based ASIL-C compliance of the CDDs.
Business Challenge:
The complex device drivers were already developed and are ready-to-be deployed. Customer realized the need for ASIL-C compliance of these device drivers post the development.
This realization was the result of the HARA analysis (as per ISO26262 framework) performed by the customer at a later stage. The components with which CDD interacted were mostly ASIL-C. It was therefore decided that these device drivers should also be ASIL-C compliant.
The main challenge before the customer was to go back to the design level and implement ISO26262 mandated safety planning activities across the development process.
After a few rounds of discussion with the functional safety team of the customer, the following project scope was chalked out:
Development Interface Agreement (DIA) was to be signed together. Safety Plan to be created at Embitel for the activities involved in CDD compliance.
SW compliance scope was confined from Unit Design to Unit testing as per ISO26262 Standard Part 6.
Making necessary changes in the design and tech specs of the CDD based on code check report.
Report generation from different tools as evidence for ASIL-C compliance.
Part-2 (Safety Management) and Part 8 (Support Process) of the ISO26262 guidelines had to be implemented.
Integration of ISO26262 ASIL-C CDD modules with the final project.
Embitel’s Solution:
As the complex device drivers were already developed, we had to retrace our steps and go back to the unit designing part. We covered part-2, part-6 and part-8 of the safety lifecycle as recommended by ISO26262 standard.
Here is the step-by-step process we adhered to for ISO26262 ASIL-C compliance safety lifecycle–
Implementing the Functional Safety guidelines from Part-2 document of the ISO26262 Framework:
Confirmation reviews of the entire safety lifecycle.
Development Interface Agreement (DIA) RASI- Responsibility Accountability Support and Information.
Safety planning activities.
The Part-6 document recommended methods and techniques were followed manually as well as with the help of testing tools like Polyspace and Cantata.
The Unit Design, Implementation and Testing was implemented as per the mandatory guidelines for ASIL-C compliance under Part-6 document of the ISO26262 standard.
ASIL-C compliant design documents based on flowcharts generated by UML based tool.
Part 6 contains several methods like backward and forward recovery, control flow analysis and data flow analysis, etc. All such relevant methods were covered.
We performed the static and dynamic code analysis using Polyspace and the unit test cases using CanTATA. These tools help in analyzing the coverage of part 6 techniques in addition to technical reviews by Safety team.
Confirmation review was performed on all safety case evidences whether they were technical analysis reports or safety management artifacts.
We also handled the processes related to the execution of safety lifecycle as recommended in the part-8 document of the ISO26262 framework. The safety specific QMS also included:
Configuration Management, Root Cause Analysis.
Tool Qualification- Whether the tools used are ISO26262 compliant.
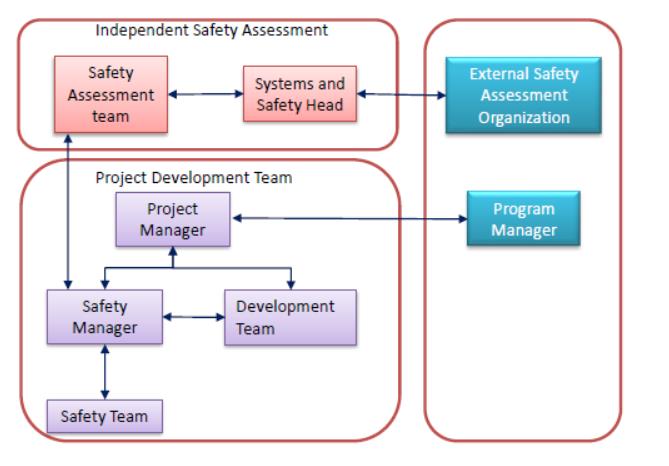
The Team Structure for Automotive Functional Safety project:
This is how our team structure looked like:
Team comprised of a dedicated Safety Manager along with a Project Manager. The Functional Safety team, Software Development team and the QA team worked together to ensure all the guidelines of ISO26262 standard were implemented in letter and spirit.
Embitel’s Impact:
We were able to make a considerable impact with our Functional safety expertise. The production-grade Complex Device Drivers were now on the same level as the components they interacted with i.e. ASIL-C.
The impact was felt across all components that communicated with the help of CDDs:
It ensured additional safety mechanism as per Part-6 of standard.
More ways of going to the safe state in case of any fault, were added as per the standard.
Identification of severity, occurrence and detection got improved.
Better measurement of the fault would also help in prevention of any damage in the future. In the context of electric vehicles this would help the customer in the long run to build safer and more efficient EVs.
As we had developed the CDDs for the customer, our automotive team was fully aware of the project nuances. This reduced the time and cost to get the ASIL-C compliance done.
Tools and Technologies Expertise:
Polyspace – Running the tool for ASIL-C compliant Static and Dynamic analysis and correction of errors and warnings as per the reports.
CanTATA – Setup and running of ASIL-C compliant Unit testing and correction of errors and warnings as per the reports.
Surround View system is a 4 camera based system useful in assisting the driver during the parking for safe parking and also to detect objects present in the vicinity of the vehicle during slow moving traffic. The system has a host controller (MPC5604P) and a DSP core (visionmid). The host module controls the entire system and communicates to head unit via CAN.
Business case details:
Generating AUTOSAR complaint application SW using DaVinci developer.
Defining customer specific diagnostics based on UDS (CANdela and .xls)
Development of the diagnostics services (UDS) – RID ($31) services and DID ($22) services
Functional testing in CAR and lab set up with Head Unit.
Integration testing and testing of Diagnostic services.
Client:
Ireland based Major tier1 supplier in the automotive domain
Vehicle simulation and testing of the powerplant for high and cornering torques in hard real time.
System Overview
Hybrid powerplant model when tested in non-real time or soft real time causes vibrations in the steering wheel because of the unwanted delays in the system. So, the model needs to be tested in hard real time for high and cornering torques.
Powerplant model is developed in Carsim and imported to Simulink as a library. Sensowheel block sets are used for interfacing with the sensodrive steering wheel and Logitech pedal controls. PCAN communication is used to send and receive messages from the sensodrive controller.
Implementation
Controller Model development in Simulink
Developing the controller model for a vehicle plant model created in Carsim
Controller model includes the interface block sets for Sensowheel and Logitech pedal controls
PCAN Setup for communication
PCAN communication is setup between the plant model running on XPC target and the sensowheel
Hybrid powerplant Model Testing
The application code is generated and downloaded to XPC target
Hybrid powerplant model is tested for high and cornering torques
Functional validation of the CAN controller of an ARM cored Integrated GPS chip
System Overview
Our Client’s decision to outsource CAN validation was based on the premise that ‘the more testing you do; the better’. With finite resources and specialized knowledge in the GPS domain, the client could at best conduct only high level testing for this Automotive protocol. Embitel’s expertise in the Embedded Automotive domain and our reputation for providing high quality validation services made Embitel the choice of Vendor.
To carry out the functional validation of the CAN controller, Embitel proposed a comprehensive test plan with more than 100 unique test cases of the following:
Embitel offers testing as a dedicated service. We offer services in the area of software testing (Unit, Integration and system level) as well HIL (Hardware in Loop), MIL(Model in Loop) and SIL testing.
Our skill set in this domain covers all major tool chains such as Mathworks, ETAS, dSpace, MBTech, Opal-RT, Reatis, Tessy, etc.
In one such project, for a German tier2 client, we executed HIL testing using ETAS tool chain. The project scope covers unit testing and integration testing of Exhaust System Software, CAN, KWP2000 and UDS services.
System Overview:
Participation in test automation, test-plan and test-case preparation
Multitron Labcar from ETAS as vehicle simulator
INCA software used for Measurement and Calibration
Calibration through CCP using ES690 from ETAS
Flashing through PROF/ JTAG debugger
Vector CANalyzer for simulation and testing of CAN nodes
Automation of CAN testing using CAPL programs
Customer tool for diagnostic testing (KWP2000 over CAN)
Development of plant and controller models for an autonomous vehicle and perform the Software in Loop (SIL) testing.
System Overview
The autonomous vehicle runs in guided as well as manual mode. The vehicle runs based on the magnets fit in the road. In guided mode
Vehicle speed and path is decided by the GPS and saved route data.
Vehicle path is given by the controller based on the magnetic sensor which detects the magnets in the road and gives the error calculated.
Steering input is taken from the servo controller and hence do not require any steering input from the driver. Vehicle goes into manual mode when a steering input from the driver is detected. The servo drive provides the steering torque required.
Controller requires throttle input from the driver.
In manual mode
Vehicle runs as it runs in guided mode but takes steering input from the driver instead of the controller.
Implementation
Plant Model development in Trucksim
Develop a Trucksim plant model including vehicle dynamics and inbuilt powerplant
Create interfaces with Simulink using VS commands
Controller Model development in Simulink
Developing the steering controller for the vehicle to run in guided mode and manual mode
Sensors and Actuators Modelling in Simulink
Developing the place holders for sensors and actuators for the vehicle in Simulink